近期,w88优德体育电子电气工程学院陈蓓副教授课题组在滑模控制领域取得多项研究成果,以第一作者和通讯作者在国际控制领域重要学术期刊《IEEE Transactions on Cybernetics》(工程技术大类1区Top期刊, IF=10.089)上发表论文“Input-to-state stabilization of stochastic Markovian jump systems under communication constraints: genetic algorithm-based performance optimization”,在《International Journal of Robust and Nonlinear Control》(工程技术大类2区Top期刊, IF=3.771)上发表论文“Dynamic event-triggered sliding mode security control for Markovian jump systems: Learning-based iteration optimization method”和“Sliding mode switched control for Markovian jump systems against intermittent denial-of-service attacks”。
网络通信技术的飞速发展和日益普及,给社会发展带来便利的同时,也因为网络的开放性受到不可避免的恶意攻击和威胁,同时网络资源的共享性和带宽限制,也会引起数据拥塞,导致传输时滞和信息丢失,从而直接影响控制系统性能。因此,受限于有限网络资源限制和无线通讯传输易侵入性,网络化Markov跳跃系统实际应用面临关键问题:如何降低网络通讯负担,并提高控制器对抗攻击的能力。针对上述问题,课题组开展了信息受限下Markov跳跃系统滑模控制问题研究,具体包括:
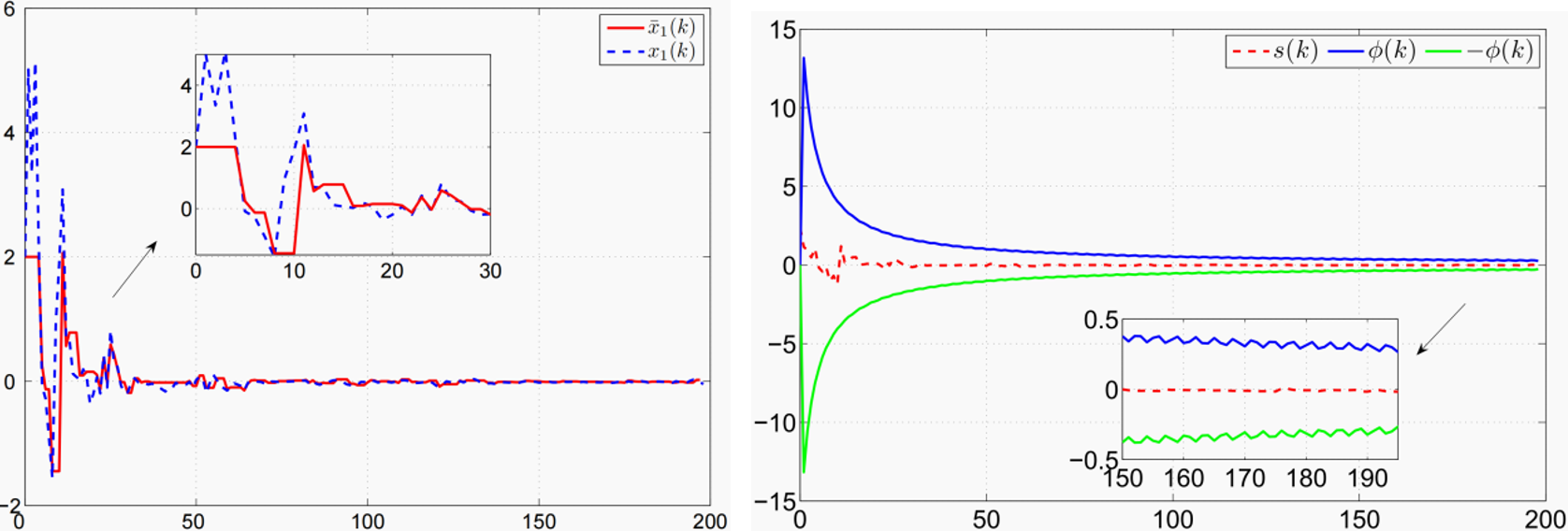
一是建立了通讯受限下信道依Markov链随机调度的滑模控制策略:利用随机调度协议对通讯信道进行调度,建立了信道调度协议下信息补偿机制,解决了调度协议下滑模控制器的设计问题,保证了有限网络资源约束下控制系统的动态性能,拓宽了Markov建模方法的应用领域。
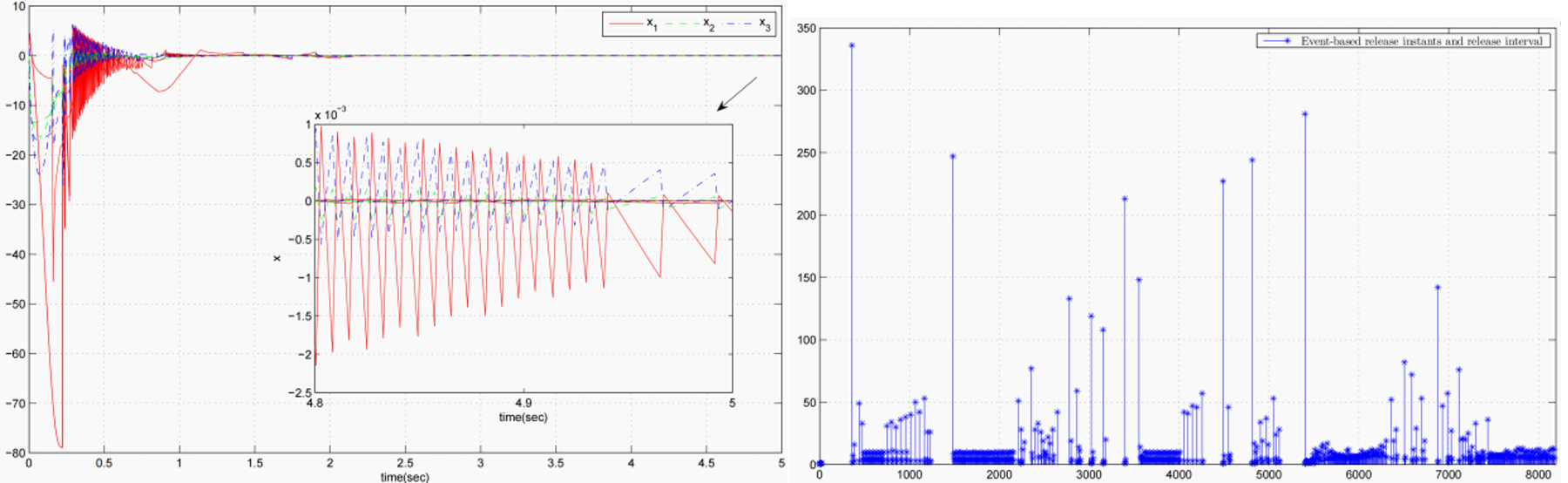
二是建立了通讯受限与虚假数据注入攻击下基于事件触发的滑模控制策略:针对存在虚假数据注入攻击和系统状态不可测的Markov跳跃系统,为了减少冗余数据传输,引入动态事件触发机制调控系统状态传输,设计了基于控制模态估计的动态事件触发异步滑模控制器,给出了闭环系统随机一致有界的充分条件,证明了均方意义下滑模面邻域可达性,并基于GA优化算法求解控制增益。

三是建立了间歇性拒绝服务攻击下的滑模控制策略:针对间歇性拒绝服务攻击和系统状态不可测下的Markov跳跃系统,根据拒绝服务攻击的不同状态设计了同步/异步切换型滑模控制器,保证在攻击和系统状态不可测的情况下,也可以实现闭环系统的指数均方稳定性。
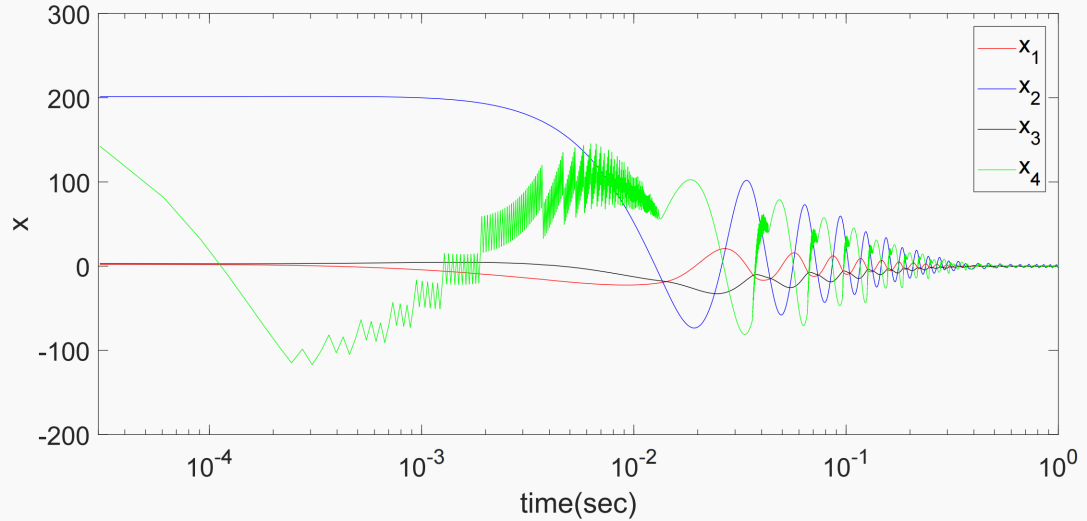
四是将上述成果拓展到直流微电网系统,以滑模控制方法解决虚假数据注入攻击下一类直流微电网系统的镇定问题。相关成果发表于国内控制领域重要学术期刊《控制与决策》(DOI:10.13195/j.kzyjc.2021.0606),第一作者为硕士研究生楼琦凯,通讯作者为导师陈蓓,。
上述工作获得国家自然科学基金面上项目(62173222,主持)、青年项目(61803255,主持)、上海市自然科学基金面上项目(18ZR1416700,主持)和科技创新2030-“新一代人工智能”重大项目(2020AAA0109301,参与)资助。